2025
Aalok Patwardhan, Callum Rhodes, Gwangbin Bae, and Andrew J. Davison. U-ARE-ME: Uncertainty-Aware Rotation Estimation in Manhattan Environments. 3DV2025
|
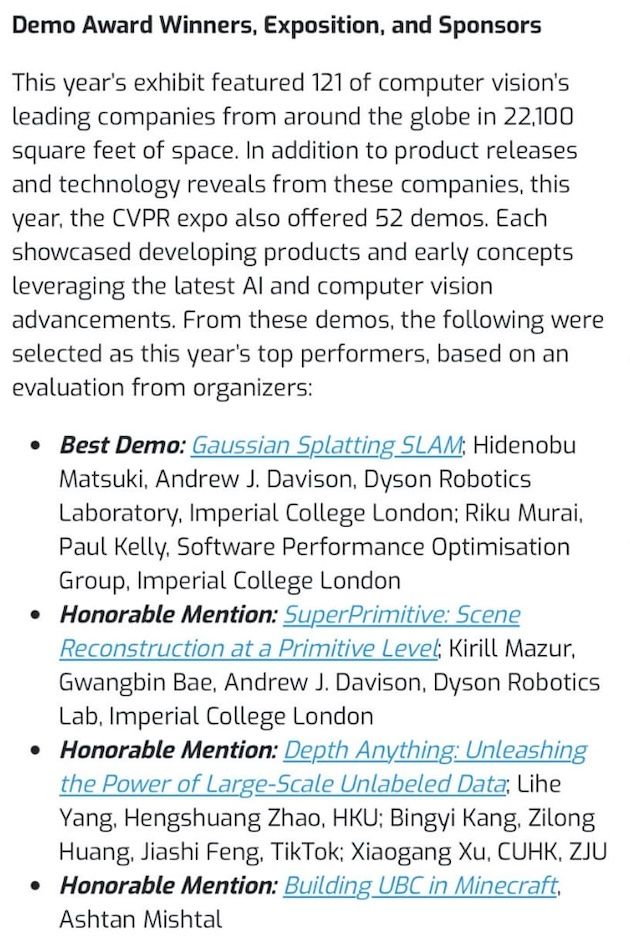
Eric Dexheimer and Andrew J Davison. COMO: Compact Mapping and Odometry. ECCV2024 Archive Link Video Link Code Link Gwangbin Bae and Andrew J. Davison. Rethinking Inductive Biases for Surface Normal Estimation. CVPR2024 Xin Kong, Shikun Liu, Xiaoyang Lyu, Marwan Taher, Xiaojuan Qi, Andrew J. Davison. EscherNet: A Generative Model for Scalable View Synthesis. CVPR2024 Kirill Mazur, Gwangbin Bae, Andrew J. Davison. SuperPrimitive: Scene Reconstruction at a Primitive Level. CVPR2024 (Honorable Mention) Hidenobu Matsuki, Riku Murai, Paul H. J. Kelly, Andrew J Davison. Gaussian Splatting SLAM. CVPR2024 (Best Demo) Hide et al_CVPR2024 Video Link Aalok Patwardhan and Andrew J. Davison. A Distributed Multi-Robot Framework for Exploration, Information Acquisition and Consensus. ICRA 2024 Marwan Taher, Ignacio Alzugaray and Andrew J. Davison. Fit-NGP: Fitting Object Models to Neural Graphics Primitives. ICRA2024 Ivan Kapelyukh*, Yifei Ren*, Ignacio Alzugaray, and Edward Johns. Dream2Real: Zero-Shot 3D object Rearrangement with Vision-Language Models. ICRA2024 |
|---|
|
Aalok Patwardhan, Riku Murai, Andrew J. Davison. The GBP Planner || Distributing Collaborative Multi-Robot Planning with Gaussian Belief Propagation. RA-L 2023, ICRA 2023 Hidenobu Matsuki, Edgar Sucar, Tristan Laidow, Kentaro Wada, Raluca Scona, Andrew J Davison. iMODE: Real-Time Incremental Monocular Dense Mapping Using Neural Field. ICRA, 2023 Archive Link Video Link Eric Dexheimer, Andrew J Davison. Learning a Depth Covariance Function. CVPR, 2023 Xin Kong, Shikun Liu, Marwan Taher, Andrew Davison. vMAP: Vectorised Object Mapping for Neural Field SLAM. CVPR, 2023 |
|---|
|
Kirill Mazur, Edgar Sucar, Andrew Davison. Feature-Realistic Neural Fusion for Real-Time, Open Set Scene Understanding. arXiv, 2022 |
|---|
|
Iain Haughton, Edgar Sucar, Andre Mouton, Edward Johns, and Andrew Davison. Real-time Mapping of Physical Scene Properties with an Autonomous Robot Experimenter. CoRL, 2022 |
|
Ivan Kapelyukh, Vitalis Vosylius, and Edward Johns. DALL-E-Bot: Introducing Web-Scale Diffusion Models to Robotics. NeurIPS, 2022 and CoRL, 2022 |
|
Aalok Patwardhan, Riku Murai, Andrew J. Davison. Distributing Collaborative Multi-Robot Planning with Gaussian Belief Propagation. IEEE Robotics and Automation Letters, 2022 patwardhan_etal_arXiv2022(pdf) Archive Link Video Link |
|
Dorian F. Henning, Tristan Laidlow and Stefan Leutenegger. BodySLAM: Joint Camera Localisation, Mapping, and Human Motion Tracking. ECCV, 2022 |
|---|
|
Shikun Liu, Shuaifeng Zhi, Edward Johns,Andrew J. Davison. Bootstrapping Semantic Segmentation with Regional Contrast. ICLR, 2022 shikunLiu_etal_iclr2022(pdf) |
|
Kentaro Wada, Stephen James, Andrew J. Davison. ReorientBot: Learning Object Reorientation for Specific-Posed Placement. ICRA, 2022 wada_etal_ICRA2022(pdf) Archive Link Video Link |
|---|
|
Kentaro Wada, Stephen James, Andrew J. Davison. SafePicking: Learning safe object extraction via object-level mapping. ICRA, 2022 wada_etal_safepicking_ICRA2022(pdf) Archive Link Video Link |
|
Raluca Scona, Hidenobu Matsuki, Andrew J. Davison. From Scene Flow to Visual Odometry Through Local and Global Regularisation in Markov Random Fields. ICRA, 2022 Scona_etal_ICRA2022(pdf) Video Link |
|
Stephen James, Andrew J. Davison. Q-attention: Enabling Efficient Learning for Vision-based Robotic Manipulation. ICRA, 2022 Archive Link Video Link |
|
Shuaifeng Zhi, Edgar Sucar, Andre Mouton, Iain Haughton, Tristan Laidlow, Andrew J. Davison. ILabel: Interactive Neural Scene Labelling. arXiv, 2021 shuaifeng_etal_arXiv2021(pdf) Archive Link Video Link Project Page |
|---|
|
Shuaifeng Zhi, Tristan Laidlow, Stefan Leutenegger, Andrew J. Davison. In-Place Scene Labelling and Understanding with Implicit Scene Representation. ICCV, 2021 szhi_etal_iccv2021.pdf Archive Link Video Link |
|---|
|
Zoe Landgraf, Raluca Scona, Tristan Laidlow, Stephen James, Stefan Leutenegger, Andrew J. Davison. SIMstack: A Generative Shape and Instance Model for Unordered Object Stacks. ICCV, 2021 Archive Link Video Link |
|---|
|
Edgar Sucar, Shikun Liu, Joseph Ortiz, Andrew J. Davison. iMAP: Implicit Mapping and Positioning in Real Time. ICCV, 2021 Archive Link Video Link |
|---|
|
Hidenobu Matsuki, Raluca Scona, Jan Czarnowski, Andrew J. Davison. CodeMapping: Real-Time Dense Mapping for Sparse SLAM Using Compact Scene Representations. IROS2021 and RA-L21 Archive Link Video Link |
|---|
|
Stephen James, Kentaro Wada, Tristan Laidlow, Andrew J. Davison. Coarse-to-Fine Q-attention: Efficient Learning for Visual Robotic Manipulation via Discretisation. arXiv:2106.12534, 2021 Archive Link Video Link |
|---|
|
Stephen James, Andrew J. Davison. Q-attention: Enabling Efficient Learning for Vision-based Robotic Manipulation. arXiv:2105.14829, 2021 Archive Link Video Link |
|---|
|
Shikun Liu, Shuaifeng Zhi, Edward Johns, Andrew J. Davison. Bootstrapping Semantic Segmentation with Regional Contrast. arXiv:2104.04465, 2021 Archive Link |
|---|
|
Daniel Lenton, Stephen James, Ronald Clark, Andrew J. Davison. END-TO-END Egospheric Spatial Memory. ICLR2021 Archive Link Video Link |
|---|
|
Edgar Sucar, Kentaro Wada, Andrew J. Davison. NodeSLAM: Neural Object Descriptors for Multi-View Shape Reconstruction. 3DV2021 Archive Link Video Link |
|---|
|
Kentaro Wada, Edgar Sucar, Stephen James, Daniel Lenton and Andrew J. Davison. MoreFusion: Multi-object Reasoning for 6D Pose Estimation from Volumetric Fusion. CVPR2020 Archive Link Video Link |
|---|
|
Jan Czarnowski, Tristan Laidlow, Ronald Clark, Andrew J. Davison. DeepFactors: Real-Time Probabilistic Dense Monocular SLAM. ICRA2020 and RA-L019 Archive Link Video Link |
|---|
|
Tristan Laidlow, Jan Czarnowski, Andrea Nicastro, Ronald Clark, Stefan Leutenegger. Towards the Probabilistic Fusion of Learned Priors into Standard Pipelines for 3D Reconstruction. ICRA2020 tlaidlow_etal_icra2020.pdf |
|---|
|
Zoe Landgraf, Fabian Falck, Michael Bloesch, Stefan Leutenegger, Andrew Davison. Comparing View-Based and Map-Based Semantic Labelling in Real-Time SLAM. ICRA2020 Archive Link Video Link |
|---|
|
Stephen James, Zicong Ma, David Rovick Arrojo, Andrew J. Davison. RLBench: The Robot Learning Benchmark & Learning Environment. ICRA2020 and RA-L019 james_etal_2019 Video Link |
|---|
|
Alessandro Bonardi, Stephen James, Andrew J. Davison. Learning One-Shot Imitation from Humans without Humans. ICRA2020 and RA-L019 Archive Link Video Link |
|---|
|
Stephen James, Zicong Ma, David Rovick Arrojo, Andrew J. Davison. RLBench: The Robot Learning Benchmark & Learning Environment. 2019 james_etal_2019 Video Link |
|---|
|
Michael Bloesch, Tristan Laidlow, Ronald Clark, Stefan Leutenegger, Andrew J. Davison. Learning Meshes for Dense Visual SLAM. IEEE International Conference on Computer Vision (ICCV), 2019 mbloesch_etal_iccv2019.pdf Video Link |
|---|
|
Andrea Nicastro, Ronald Clark, Stefan Leutenegger. X-Section: Cross-Section Prediction for Enhanced RGB-D Fusion. IEEE International Conference on Computer Vision (ICCV), 2019 anicastro_etal_iccv2019.pdf anicastro_etal_supp_iccv2019.pdf Video Link |
|---|
|
Shuaifeng Zhi, Michael Bloesch, Stefan Leutenegger, Andrew Davison. SceneCode: Monocular Dense Semantic Reconstruction using Learned Encoded Scene Representations. CVPR, 2019 szhi_etal_cvpr2019.pdf Video Link |
|---|
|
Charlie Houseago, Michael Bloesch, Stefan Leutenegger. KO-Fusion: Dense Visual SLAM with Tightly-Coupled Kinematic and Odometric Tracking. ICRA, 2019 chouseago_etal_icra2019.pdf Video Link |
|---|
|
Tristan Laidlow, Jan Czarnowski, Stefan Leutenegger. DeepFusion: Real-Time Dense 3D Reconstruction for Monocular SLAM using Single-View Depth and Gradient Predictions. ICRA, 2019 tlaidlow_etal_icra2019.pdf |
|---|
|
Stephen James, Michael Bloesch, Andrew J. Davison. Task-Embedded Control Networks for Few-Shot Imitation Learning. CoRL, 2018 sjames_etal_corl2018.pdf Archive Link Video Link |
|---|
|
Ronald Clark, Michael Bloesch, Jan Czarnowski, Stefan Leutenegger, Andrew J. Davison. LS-Net: Learning to Solve Nonlinear Least Squares for Monocular Stereo. ECCV, 2018 rclark_etal_eccv2018.pdf Publisher Web Link Archive Link Video Link |
|---|
|
John McCormac, Ronald Clark, Michael Bloesch, Stefan Leutenegger, Andrew J. Davison. Fusion++: Volumetric Object-Level SLAM. 3DV, 2018 jmccormac_etal_3dv2018.pdf Archive Link Video Link |
|---|
|
Michael Bloesch, Jan Czarnowski, Ronald Clark, Stefan Leutenegger, Andrew J. Davison. CodeSLAM - Learning a Compact, Optimisable Representation for Dense Visual SLAM. CVPR, 2018 (Honorable Mention) mbloesch_etal_cvpr2018.pdf Open Access Link Archive Link Video Link |
|---|
|
Stephen James, Andrew J Davison and Edward Johns. Transferring End-to-End Visuomotor Control from Simulation to Real World for a Multi-Stage Task. CoRL, 2017 sjames_etal_corl2017.pdf |
|---|
|
Jan Czarnowski, Stefan Leutenegger, Andrew J Davison. Semantic Texture for Robust Dense Tracking. Geometry Meets Deep Learning Workshop, International Conference on Computer Vision (ICCV), 2017 jczarnowski_etal_iccv2017.pdf Video Link |
|---|
|
John McCormac, Ankur Handa, Stefan Leutenegger, Andrew J Davison. SceneNet RGB-D: Can 5M Synthetic Images Beat Generic ImageNet Pre-training on Indoor Segmentation?. International Conference on Computer Vision (ICCV), 2017 Dataset Link |
|---|
|
Tristan Laidlow, Michael Bloesch, Wenbin Li and Stefan Leutenegger. Dense RGB-D-Inertial SLAM with Map Deformations. IEEE International Conference on Intelligent Robots and Systems (IROS), 2017 tlaidlow_etal_iros2017.pdf Video Link |
|---|
|
Robert Lukierski, Stefan Leutenegger and Andrew J. Davison. Room Layout Estimation from Rapid Omnidirectional Exploration. IEEE International Conference on Robotics and Automation (ICRA), 2017 rlukierski_etal_icra2017.pdf Open Access Link |
|---|
|
John McCormac, Ankur Handa, Andrew J Davison, Stefan Leutenegger. SemanticFusion: Dense 3D Semantic Mapping with Convolutional Neural Networks. IEEE International Conference on Robotics and Automation (ICRA), 2017 jmccormac_etal_icra2017.pdf Open Access Link Video Link |
|---|
|
Jacek Zienkiewicz, Akis Tsiotsios, Andrew Davison, Stefan Leutenegger. Monocular, Real-Time Surface Reconstruction using Dynamic Level of Detail. International Conference on 3D Vision (3DV), 2016 jzienkiewicz_etal_3dv2016.pdf Open Access Link Video Link |
|---|
|
Jacek Zienkiewicz, Andrew J Davison, Stefan Leutenegger. Real-Time Height Map Fusion using Differentiable Rendering. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2016 jzienkiewicz_etal_iros2016.pdf Open Access Link Video Link |
|---|
|
Edward Johns, Stefan Leutenegger, Andrew J Davison. Deep Learning a Grasp Function for Grasping Under Gripper Pose Uncertainty. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2016 ejohns_etal_iros2016.pdf Open Access Link Video Link |
|---|
|
P Bardow, AJ Davison, S Leutenegger. Simultaneous Optical Flow and Intensity Estimation from an Event Camera. The IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2016, pp. 884-892 pbarlow_etal_cvpr2016.pdf Publisher Web Link Open Access Link Video Link |
|---|
|
E Johns, S Leutenegger, AJ Davison. Pairwise Decomposition of Image Sequences for Active Multi-View Recognition. The IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2016, pp. 3813-3822 ejohns_etal_cvpr2016.pdf Publisher Web Link Open Access Link |
|---|
|
John McCormac, Ankur Handa, Stephan Leutenegger, Andrew J. Davison. SceneNet RGB-D: 5M Photorealistic Images of Synthetic Indoor Trajectories with Ground Truth. 2016 |
|---|
|
T.Whelan, R.F. Salas-Moreno, B. Glocker, A.J. Davison and S. Leutenegger. ElasticFusion: Real-Time Dense SLAM and Light Source Estimation. International Journal of Robotics Research RSS '15 Special Issue, 2016 |
|---|
|
R. Lukierski, S. Leutenegger, and A. J. Davison. Rapid Free-Space Mapping From a Single Omnidirectional Camera. In Proceedings of the European Conference on Mobile Robotics (ECMR), 2015 rlukierski_etal_ecmr2016.pdf Publisher Web Link Open Access Link |
|---|
|
T Whelan, S Leutenegger, B Glocker, R F Salas-Moreno, A Davison. ElasticFusion: Dense SLAM Without A Pose Graph. Proceedings of Robotics: Science and Systems (RSS), July 2015 twhelan_etal_rss2015.pdf Publisher Web Link Open Access Link Video Link 1 Video Link 2 |
|---|
|
Jacek Zienkiewicz, Andrew Davison. Extrinsics Auto-Calibration for Dense Planar Visual Odometry. Journal of Field Robotics, 32(5), 2014 jzienkiewicz_etal_jfr2014.pdf Publisher Web Link Open Access Link |
|---|
Other Publications
The following publications were created by either current members of the Dyson Robotics Lab or the Robot Vision Group. The research they refer to was independent to Dyson funding but have been included as they provide a good insight into the technical space we work within.
Other Group Publications
- Robot Vision Group Publications
- Professor Andrew Davison's Publications (not including those listed above)
| Year | Publication |
|---|---|
| 2016 |
|
| 2015 |
|
| 2014 |
|
| 2013 |
|
| 2012 |
|
| 2011 |
|
| 2010 |
|
| 2009 |
|
| 2008 |
|
| 2007 |
|
| Year | Publication |
|---|---|
| 2018 |
|
| 2008 |
|
| 2006 |
|
| 2005 |
|
| 2004 |
|
| 2003 |
|
| 2002 |
|
| 2001 |
|
| 2000 |
|
| 1998 |
|
News 2018-2024












Contact us
Dyson Robotics Lab at Imperial
William Penney Building
Imperial College London
South Kensington Campus
London
SW7 2AZ
Telephone: +44 (0)20 7594-7756
Email: iosifina.pournara@imperial.ac.uk